TF in ROS
In robotics, different components, such as sensors, actuators, and robot links, often operate in their own local coordinate frames. One might ask questions like:
- What is the pose of an object detected by the camera relative to the robot base frame?
- Where was the tracked object relative to the world frame 5 seconds ago?
- Where is the end-effector relative to the environmanet?
TF, which stands for Transform, is a powerful framework designed to keep track of multiple coordinate frames and their relationship over time. It provides a standardized way to transform data between these frames, ensuring that all parts of the system can communicate spatial information accurately.
TF is widely adopted in ROS due to its key features:
- Frame management: TF maintains a dynamic tree of coordinate frames, each with a unique name (e.g.
world,camera,tool). The relationships between these frames are continuously updated as the robot moves or interacts with its environment. - Transform Queries: TF allows to query the position and orientation (transform) of any frame relative to another at any point in time, given that they are part of the same TF tree. This is essential for tasks like converting sensor data to a common reference frame or planning robot motions.
- Real-time operation: TF broadcasts and listens to transforms in real time, enabling up-to-date spatial reasoning. This is critical for applications such as sensor fusion, motion planning, and real-time visualization.
- Time awareness: TF supports time-stamped transforms, allowing you to look up the state of the system at any historical or current time. This is particularly useful for synchronizing data from multiple sensors.
- Distributed system: TF can operate with a central server that contains all transform information, allowing all ROS components on any computer in the system to access the data.
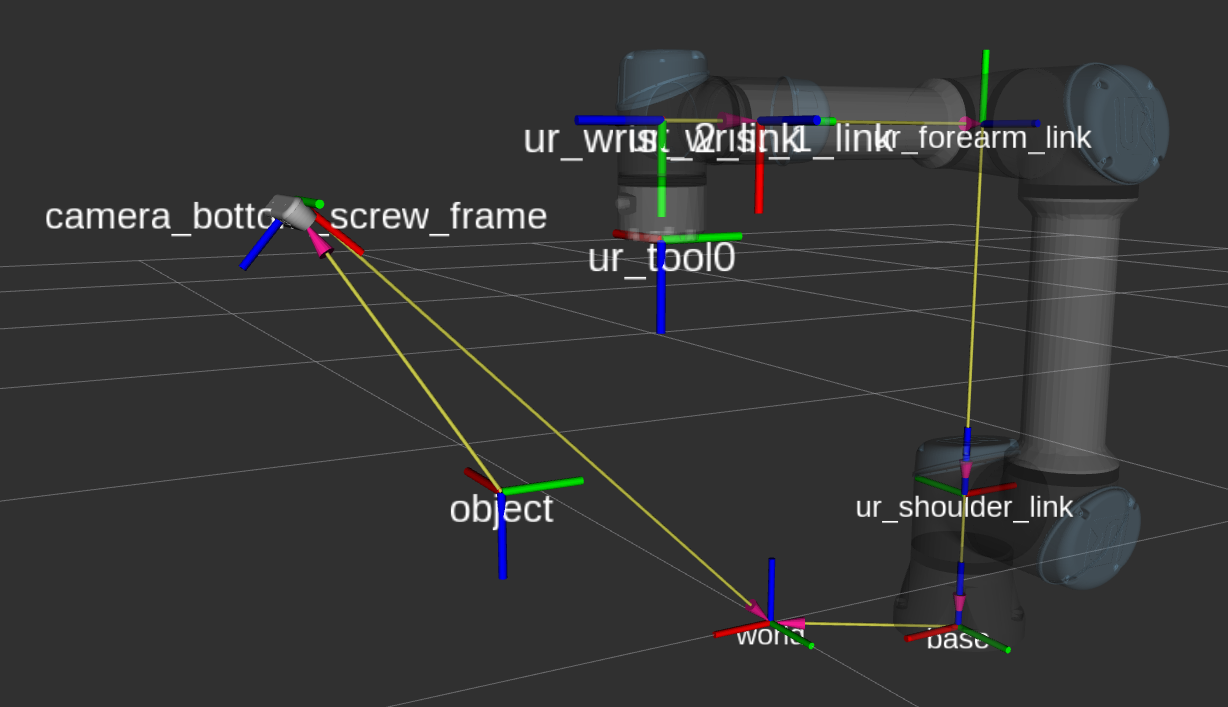
The image above shows a typical TF tree in a simple robotic application. There are numerous coordinate frames with their
respective names, each with an arrow that points towards their reference frame. For instance, the transform of the
camera is defined in world frame, as is the base of the robot. The transform of the object is known with respect
to the camera and the pose of the ur_tool0 frame is given by successive transformations along the robot links.
To drive the robot towards the object, one needs to know where the object is relative to the robot coordinate system. Doing the math to chain all these transformations manually is cumbersome and prone to errors. TF provides an easy way to look up the transform between any two frames that are part of the same tree directly.
Transforms are defined in a geometry_msgs::msg::TransformStamped message. It is stamped, meaning it has a time
associated with the transform. It also has a frame_id that refers to the reference frame of the transform, and a
child_frame_id, which is the name of the transform. Latstly, it contains the values for the translation vector and
the unit quaternion representing the rotation.
header:
stamp:
sec: 1750404981
nanosec: 370141910
frame_id: base
child_frame_id: object
transform:
translation:
x: 0.250897
y: 0.154403
z: 0.097337
rotation:
x: 0.0
y: -0.707107
z: 0.707107
w: 0.0
Understanding the concepts of TF, coordinate frames and their reference frames is crucial because it forms the foundation for how spatial relationships are represented and managed in ROS-based robotic systems.
Read more about TF in the official ROS 2 documentation.