Unified Robot Description Format
In ROS, a URDF is an XML-based format used to describe the physical configuration of a robot. The terms URDF and robot description are often used interchangeably. URDF files define the robot's structure in terms of:
- Links: Rigid bodies representing parts of the robot (e.g. arms, base, sensors).
- Joints: Connections between links, specifying how they move relative to each other (e.g. revolute, prismatic, etc.).
- Visuals and Collisions: 3D geometry for visualization and collision checking.
- Inertial Properties: Mass and inertia of links for physics simulation.
URDFs are essential for simulation, visualization, motion planning, and interfacing with tools like ros2_control. They provide a standardized way to represent a robot's kinematic and dynamic properties.
Different tools or simulators might require different formats for a robot description (e.g. SDF for Gazebo, USD and XRDF for Isaac Sim, MJCF for MuJoCo, etc.). They all share the same basic ideas and there exists a wide range of open source conversion tools.
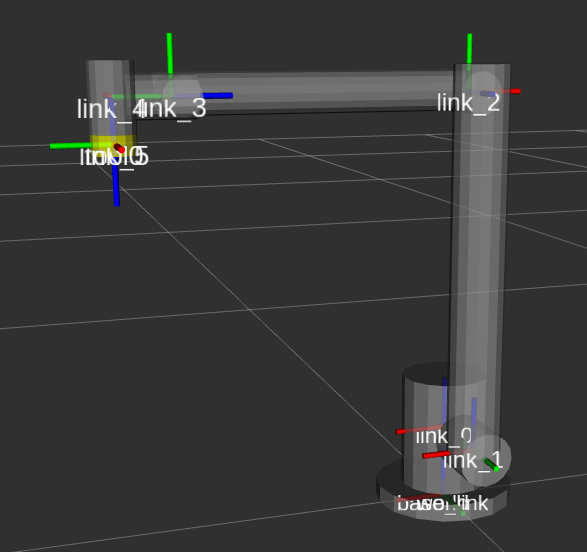
The XML file below shows the URDF of a very simple six axis robot arm that consists of a series of links connected by
revolute joints. Each definition of a link is followed by a joint that connects it to its child link. Links have an
optional visual tag that defines how it should be visualized. In this case, cylinders as geometrical primitives are used
to give the robot a certain look. URDFs of real hardware usually refer to 3D model files (STL, DAE) for this. Note that
the links are directly related to TF as every link will become its own coordinate frame. The image below shows
the visualization of this robot description with the links as frames in TF.
<?xml version="1.0" ?>
<robot name="six_axis_arm_robot">
<material name="generic/Yellow">
<color rgba="1 1 0 1"/>
</material>
<material name="generic/LightGrey">
<color rgba="0.6 0.6 0.6 1"/>
</material>
<link name="world"/>
<joint name="to_world" type="fixed">
<parent link="world"/>
<child link="base_link"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</joint>
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0.01"/>
<geometry>
<cylinder length="0.02" radius="0.08"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_0" type="revolute">
<parent link="base_link"/>
<child link="link_0"/>
<origin rpy="0 0 0" xyz="0 0 0.085"/>
<axis xyz="0 0 1"/>
<limit effort="30.0" lower="-3.14" upper="3.14" velocity="5.0"/>
</joint>
<link name="link_0">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.13" radius="0.05"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_1" type="revolute">
<parent link="link_0"/>
<child link="link_1"/>
<origin rpy="0 0 0" xyz="0 0.0825 0"/>
<axis xyz="0 1 0"/>
<limit effort="30.0" lower="-1.57" upper="1.57" velocity="5.0"/>
</joint>
<link name="link_1">
<visual>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.03"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
<visual>
<origin rpy="0 0 0" xyz="0 0 0.21"/>
<geometry>
<cylinder length="0.42" radius="0.03"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_2" type="revolute">
<parent link="link_1"/>
<child link="link_2"/>
<origin rpy="1.57 0 3.14" xyz="0 -0.03375 0.39"/>
<axis xyz="0 0 1"/>
<limit effort="30.0" lower="-1.57" upper="1.57" velocity="5.0"/>
</joint>
<link name="link_2">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.0225"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
<visual>
<origin rpy="0 1.57 0" xyz="-0.1525 0 -0.052500000000000005"/>
<geometry>
<cylinder length="0.35" radius="0.0225"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
<visual>
<origin rpy="0 0 0" xyz="-0.306 0 -0.023333333333333338"/>
<geometry>
<cylinder length="0.07" radius="0.02"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_3" type="revolute">
<parent link="link_2"/>
<child link="link_3"/>
<origin rpy="0 1.57 0" xyz="-0.31499999999999995 0 0"/>
<axis xyz="1 0 0"/>
<limit effort="30.0" lower="-1.57" upper="1.57" velocity="5.0"/>
</joint>
<link name="link_3">
<visual>
<origin rpy="0 0 0" xyz="0 0 -0.01125"/>
<geometry>
<cylinder length="0.07" radius="0.0225"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_4" type="revolute">
<parent link="link_3"/>
<child link="link_4"/>
<origin rpy="1.57 0 0" xyz="0 0 -0.0575"/>
<axis xyz="0 1 0"/>
<limit effort="30.0" lower="-1.57" upper="1.57" velocity="5.0"/>
</joint>
<link name="link_4">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.0225"/>
</geometry>
<material name="generic/LightGrey"/>
</visual>
</link>
<joint name="joint_5" type="revolute">
<parent link="link_4"/>
<child link="link_5"/>
<origin rpy="0 0 3.14" xyz="0 0 0.045000000000000005"/>
<axis xyz="0 0 1"/>
<limit effort="30.0" lower="-1.57" upper="1.57" velocity="5.0"/>
</joint>
<link name="link_5">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.0225"/>
</geometry>
<material name="generic/Yellow"/>
</visual>
</link>
<joint name="arm-tool0" type="fixed">
<origin rpy="0 0 0" xyz="0 0 0"/>
<parent link="link_5"/>
<child link="tool0"/>
</joint>
<link name="tool0"/>
</robot>
Check the detailed XML specifications of URDF files in the official documentation.