Colliders
The core components in AICA Studio contain several so-called Collider components that detect whether a specific target pose is inside or outside a virtual geometric object defined around a center pose. This functionality is crucial for many robotic applications because it provides the ability to:
- Avoid collisions by ensuring that robot parts or tools do not enter restricted or hazardous areas;
- Enable safe interaction by detecting when a gripper or end-effector is within a workspace or in contact with an object;
- Trigger context-aware actions such as stopping or slowing down movement, initiating grasping, or sending alerts when a target enters or exits a region.
Each components' name refers to the geometric object that is used to check for collision:
- Box Collider
- Cylinder Collider
- Sphere Collider
- Plane Collider
Interfaces
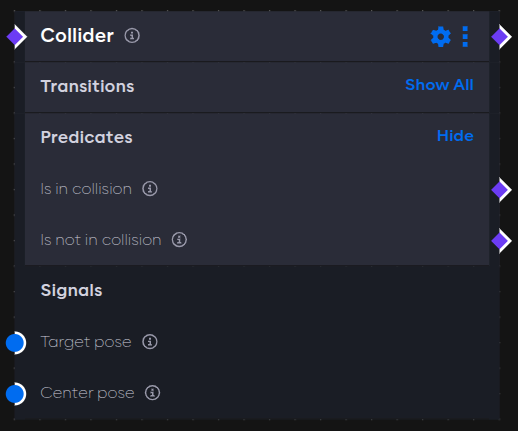
All colliders have the same input signals and predicates, as seen in the image below. The target pose input refers to the Cartesian pose that is checked against the collider region. The center pose input defines the center of the region (the barycenter of the geometric object). The predicate "is in collision" is true whenever the target is within the collider region (or, in the case of the Plane Collider, when the target is below the plane), and conversely the predicate "is not in collision" is true in the opposite case.
Parameters
Additionally, each collider variant may have different parameters that are required to define specific properties. For the following colliders, the parameters define the size and shape of the geometric object.
- Box Collider: the side lengths of the box in the x, y, and z direction
- Cylinder Collider: the radius of the cylinder in the x-y plane and the height in the z direction
- Sphere Collider: the radius of the sphere
For the Plane Collider, the parameter "Flip normal" determines which side of the plane is considered "in collision"; by default, this is when the z position of the target pose is negative in the coordinate system of the center pose.
Until collider visualizations are natively integrated in AICA Studio, these examples use RViz to visualize and move the collision targets in space. RViz can be started directly from AICA Launcher.
Box Collider example
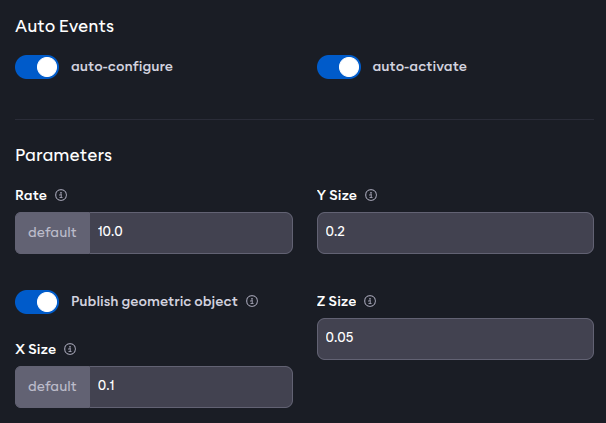
This example uses two Interactive Marker components for the target and center pose of the collider. The Box Collider
is parametrized to define a box of dimensions 10 by 20 by 5 centimeters around the center pose. Note that the
Publish geometric object flag is also toggled on to generate a visualization in RViz.
Start the application from AICA Studio, then go to RViz. Add the interactive marker frame and the geometric object marker as shown below. Observe how moving the interactive marker triggers the predicates of the collider component to update when the target pose enters and exits the box.
Application YAML
schema: 2-0-4
dependencies:
core: v4.4.1
on_start:
load:
- component: box_collider
- component: interactive_marker
- component: interactive_marker_copy
components:
box_collider:
component: aica_core_components::utility::BoxCollider
display_name: Box Collider
events:
transitions:
on_load:
lifecycle:
component: box_collider
transition: configure
on_configure:
lifecycle:
component: box_collider
transition: activate
parameters:
publish_marker: true
y_size: 0.2
z_size: 0.05
inputs:
target: /interactive_marker/pose
center: /interactive_marker_copy/pose
interactive_marker:
component: aica_core_components::ros::InteractiveMarker
display_name: Target Interactive Marker
parameters:
frame: target
initial_pose:
- !!float 0.0
- !!float 1.0
- !!float 0.0
- !!float 1.0
- !!float 0.0
- !!float 0.0
- !!float 0.0
outputs:
pose: /interactive_marker/pose
interactive_marker_copy:
component: aica_core_components::ros::InteractiveMarker
display_name: Center Interactive Marker
parameters:
frame: center
initial_pose:
- !!float 0.0
- !!float 0.0
- !!float 0.0
- !!float 1.0
- !!float 0.0
- !!float 0.0
- !!float 0.0
handle_scale: 0.01
outputs:
pose: /interactive_marker_copy/pose
graph:
positions:
components:
box_collider:
x: 660
y: 60
interactive_marker:
x: 160
y: 180
interactive_marker_copy:
x: 160
y: 440
edges:
on_start_on_start_box_collider_box_collider:
path:
- x: 360
y: 40
- x: 360
y: 120
on_start_on_start_interactive_marker_interactive_marker:
path:
- x: 140
y: 40
- x: 140
y: 240
on_start_on_start_interactive_marker_copy_interactive_marker_copy:
path:
- x: 140
y: 40
- x: 140
y: 500
interactive_marker_copy_pose_box_collider_center:
path:
- x: 600
y: 660
- x: 600
y: 440
Plane Collider example
Switching from the Box Colldier to the Cyclinder or Sphere Collider components is straightforward. However, it is worth looking at the Plane Collder separately because it is not immediately obvious on which side of the plane the target is in collision with the plane and on which side it is not in collision.
As per the component description, a target pose is considered in collision if it has a negative z coordinate with respect to the center pose. That means, if a table is defined by a Plane Collider and the z axis of the center pose, which corresponds to the normal to the table, points up, the target pose is in collision as soon as it reached (or penetrated) the table.
This behavior can be inverted with the "Flip normal" parameter. The direction of the z axis will be flipped internally.
The example below shows an application that is stopped entirely if the robot end-effector collides with the plane. This demonstrates how soft safety mechanisms can be implemented in AICA Studio. As soon as the target pose, which is the end-effector in this case, has a negative z coordinate relative to the center pose, the in collision predicate fires and the application is stopped immediately.
Application YAML
schema: 2-0-4
dependencies:
core: v4.4.1
on_start:
load:
- component: interactive_marker
- component: interactive_marker_copy
- component: plane_collider
- hardware: hardware
components:
interactive_marker:
component: aica_core_components::ros::InteractiveMarker
display_name: Target Interactive Marker
parameters:
frame: target
initial_frame: tool0
outputs:
pose: /interactive_marker/pose
interactive_marker_copy:
component: aica_core_components::ros::InteractiveMarker
display_name: Center Interactive Marker
parameters:
frame: center
initial_pose:
- 0.1
- !!float 0.0
- 0.3
- !!float 1.0
- !!float 0.0
- !!float 0.0
- !!float 0.0
handle_scale: 0.01
outputs:
pose: /interactive_marker_copy/pose
plane_collider:
component: aica_core_components::utility::PlaneCollider
display_name: Plane Collider
events:
predicates:
is_in_bounds:
application: stop
transitions:
on_load:
lifecycle:
component: plane_collider
transition: configure
on_configure:
lifecycle:
component: plane_collider
transition: activate
parameters:
publish_marker: true
inputs:
target: /hardware/robot_state_broadcaster/cartesian_state
center: /interactive_marker_copy/pose
hardware:
hardware:
display_name: Hardware Interface
urdf: Generic six-axis robot arm
rate: 100
events:
transitions:
on_load:
load:
- controller: robot_state_broadcaster
hardware: hardware
- controller: ik_position_controller
hardware: hardware
controllers:
robot_state_broadcaster:
plugin: aica_core_controllers/RobotStateBroadcaster
outputs:
cartesian_state: /hardware/robot_state_broadcaster/cartesian_state
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: robot_state_broadcaster
ik_position_controller:
plugin: aica_core_controllers/position/IKPositionController
inputs:
command: /interactive_marker/pose
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ik_position_controller
graph:
positions:
components:
interactive_marker:
x: 160
y: 180
interactive_marker_copy:
x: 160
y: 440
plane_collider:
x: 680
y: 500
hardware:
hardware:
x: 1220
y: -20
edges:
on_start_on_start_interactive_marker_interactive_marker:
path:
- x: 140
y: 40
- x: 140
y: 240
on_start_on_start_interactive_marker_copy_interactive_marker_copy:
path:
- x: 140
y: 40
- x: 140
y: 500
on_start_on_start_plane_collider_plane_collider:
path:
- x: 600
y: 40
- x: 600
y: 560
interactive_marker_copy_pose_plane_collider_center:
path:
- x: 580
y: 660
- x: 580
y: 880
plane_collider_is_in_bounds_on_stop_on_stop:
path:
- x: 1100
y: 720
- x: 1100
y: 1000
- x: -20
y: 1000
- x: -20
y: 140
hardware_hardware_robot_state_broadcaster_cartesian_state_plane_collider_target:
path:
- x: 620
y: 520
- x: 620
y: 840
interactive_marker_pose_hardware_hardware_ik_position_controller_command:
path:
- x: 1140
y: 400
- x: 1140
y: 780