Using YOLO to track objects
This example provides a use case for Object Detection Components. We show how to create a custom component which
converts bounding boxes into a 3D pose. The example works with any RBG sensor_msgs::msg::Image signal, such as
provided by the Camera Streamer component from components/core-vision. The final application will be able to track an
object with a robot based on a fixed camera position.
Setup
To run a YOLO executor, you need a yolo model file in ONNX format and a YAML class file. Yolo models are widely available in PT formats. For example, download the lightweight YOLO12n.pt from ultralytics here.
To convert a PT file to ONNX, run the following Python code with ultralytics installed:
from ultralytics import YOLO
model = YOLO("yolov12n.pt")
model.export(format="onnx") # creates 'yolov12n.onnx'
For this example, also download the standard coco.yaml class file here. Move the ONNX model file and the YAML class file into a new directory.
In AICA Launcher, create a configuration with the following core version and packages:
- AICA Core v4.4.2
collections/object-detectionfor the YOLO Executor component (TODO: check package name post-release and specify version)components/core-vision v1.0.0for the Camera Streamer component
Under Advanced Settings, add a volume containing the folder where you stored your YOLO model files and link it to
/files.
Using the YOLO Executor
The YOLO Executor component observes runs the YOLO segmentation model on an image.
It takes a camera stream and outputs the segmented image as well as the locations of bounding boxes on the image. The
user can set the Object Class parameter, which will cause the component to set the predicate Object Detected to
True when the specified object is found in the image. The Confidence Threshold parameter is the minimum score a
predicted bounding box must have to be considered a valid detection. IOU Threshold is used during Non-Maximum
Suppression (NMS) to decide whether two bounding boxes represent the same object. For example, if IOU threshold is set
to 0.5, any box that overlaps more than 50% with a higher-scoring box will be discarded. For now we leave them as
default values.
To test the YOLO executor:
- Create a new application
- Remove the default Hardware Interface node
- Add the Camera Streamer component from the core vision package
- Set the
Sourceparameter to a video device or file accordingly. - Turn on the auto-configure and auto-activate switches
- Set the
- Add the YOLO Executor component
- Set the
Model Pathparameter to the.onnxfile, e.g.,/files/yolo12n.onnx - Set the
Classes Pathparameter to the yaml label file, e.g.,/files/coco.yaml - Set the
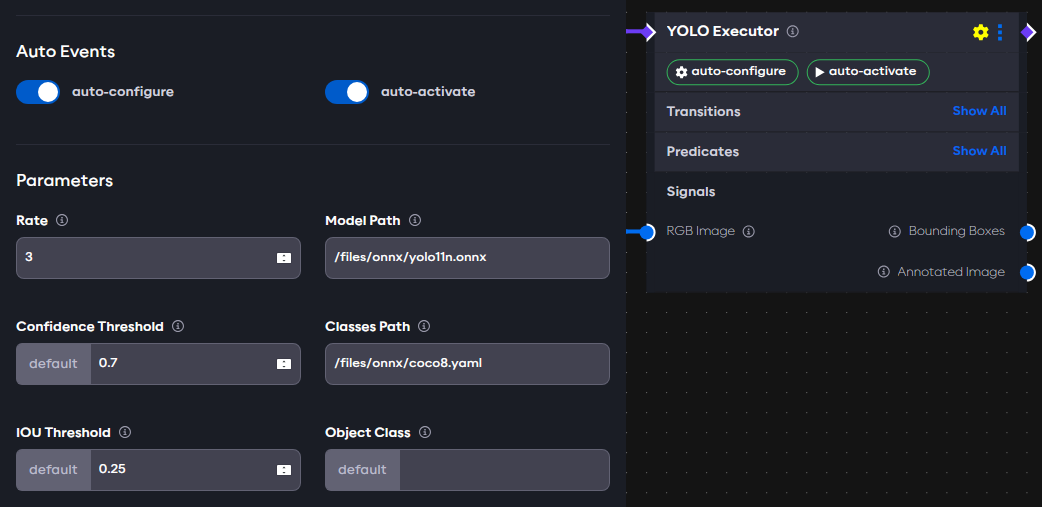
Rateparameter to 3 (works on most machines), on a machine with a GPU this can be set to higher. - Turn on the auto-configure and auto-activate switches
- Set the
- Connect the output of the start node to each component to load them when the application is started
- Connect the
Imageoutput of the Camera Streamer to theRGB Imageinput of the YOLO Executor
The complete application is shown below:
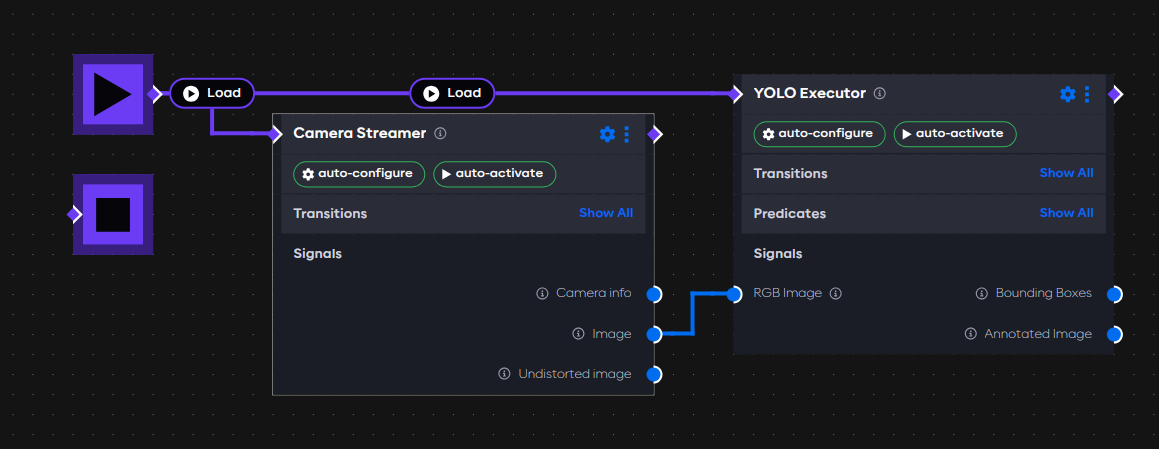
The YOLO Executors parameters are as follows:
Running the application
Start the application in AICA Studio. Then open RViz: bottom-right gear icon → "Launch RViz", then RViz → Add → By
topic → /yolo_executor/annotated_image/Image to view the YOLO model's annotated output. It should show the camera
images with bounding boxes drawn around key objects in it. The bounding boxes are published on the
yolo_executor/bounding_boxes topic as std_msgs/msg/String and can be viewed in AICA Studio in the "ROS Topics" tab.
Changing the Confidence Threshold and IOU Threshold parameters will change how often and how many bounding boxes the
model outputs.
Only users with a Linux host can visualize the image stream with RViz. On macOS, AICA Launcher will not show the RViz option.
Tracking an object with YOLO
The bounding boxes generated by YOLO can be used to move a robot towards an object.
Creating a custom component to estimate position from bounding boxes
We first need to create a custom component which can estimate a 3D pose from a position in the camera frame. More information about custom components can be found here. We make 3 simplifying assumptions:
- Camera is fixed and angled downward
- Known camera position pointing down:
(x=0, y=0.6, z=0.6) - Objects are on a flat surface at
z=0
Set up the repository
-
Create a git repository from the component-template
-
Clone the repository, enter the directory, and run:
./initialize_package.shName it
component_utilsand include a Python Lifecycle component -
Rename
py_lifecycle_component.pytoyolo_to_marker.pyinsource/component_utils/component_utils/ -
Rename
py_lifecycle_component.jsontoyolo_to_marker.jsoninsource/component_utils/component_descriptions/ -
Register the component in
source/component_utils/setup.cfgunder[options.entry_points]like this:component_utils::YoloToMarker = component_utils.yolo_to_marker:YoloToMarker
Component code
Below is the core implementation, which can be copied into the respective files. The component expects a JSON string as
input provided by the YOLO Executor component, projects bounding boxes into 3D based on camera height and field of view,
and outputs a CartesianState for robot control.
yolo_to_marker.py
import state_representation as sr
from modulo_components.lifecycle_component import LifecycleComponent
from std_msgs.msg import String
from modulo_core import EncodedState
import clproto
import json
import numpy as np
from rclpy.duration import Duration
from copy import deepcopy
class YoloToMarker(LifecycleComponent):
def __init__(self, node_name: str, *args, **kwargs):
super().__init__(node_name, *args, **kwargs)
# inputs
self.json_input = ""
self.add_input("json_input", "json_input", String)
# outputs
self._marker_pose = sr.CartesianPose("object", "camera_frame") #pose with name object, referenced to camera frame
self.add_output("marker_pose", "_marker_pose", EncodedState)
# parameters
self.to_find = 'person'
self.fov = [69, 42]
self.image_size = [480, 840]
self.object_distance = 0.6
self.add_parameter(sr.Parameter("to_find", 'person', sr.ParameterType.STRING), "thing to find and track")
self.add_parameter(sr.Parameter("fov", [69.0, 42.0], sr.ParameterType.DOUBLE_ARRAY), "Camera FoV in X")
self.add_parameter(sr.Parameter("image_size", [480, 840], sr.ParameterType.DOUBLE_ARRAY), "Size of image (pixels)")
self.add_parameter(sr.Parameter("object_distance", 0.6, sr.ParameterType.DOUBLE), "Target position (Z)")
def on_configure_callback(self) -> bool:
# configuration steps before running
self.fov = self.get_parameter_value("fov")
self.fov = np.radians(np.asarray(self.fov))
self.object_distance = self.get_parameter_value("object_distance")
return True
def __centre_pt_to_position(self, xy):
# function to find find the 3d position of an object based on position in the image.
image_size = np.asarray(self.image_size)
ratio = np.clip((xy - image_size / 2) / (image_size / 2), -1, 1)
position = ratio * self.object_distance * np.tan(self.fov/2)
position = (np.append(position, self.object_distance)).reshape((3,1))
return position
def on_step_callback(self):
try:
data = json.loads(self.json_input)['detections']
# self.get_logger().info(data)
position = {}
for i, detection in enumerate(data):
centre_of_bbox = np.asarray([
(detection['x_min'] + detection['x_max']) / 2,
(detection['y_min'] + detection['y_max']) / 2
])
position_key = f"{detection['class_name']}"
position[position_key] = self.__centre_pt_to_position(centre_of_bbox)
self.get_logger().info(f'{position}')
# output pose of target object
to_find = self.get_parameter_value("to_find")
if to_find in position:
self._marker_pose.set_position(position[to_find])
except Exception as e:
self.get_logger().error(f'Error in on_step_callback: {e}')
yolo_to_marker.json
{
"$schema": "https://docs.aica.tech/schemas/1-1-1/component.schema.json",
"name": "YOLO to marker",
"description": {
"brief": "Reads bounding boxes and outputs an interactive marker",
"details": "This component receives YOLO object detection outputs in JSON format, identifies a specified target object, and converts its bounding box coordinates into a 3D Cartesian pose relative to the camera frame. The pose is computed assuming a fixed distance from the camera and using the camera's field of view and image resolution. If the target object is detected, its 3D position is output as an interactive marker pose."
},
"registration": "component_utils::YoloToMarker",
"inherits": "modulo_components::LifecycleComponent",
"inputs": [
{
"display_name": "Json Input",
"description": "Bounding boxes from YOLO model",
"signal_name": "json_input",
"signal_type": "string"
}
],
"outputs": [
{
"display_name": "Pose Command",
"description": "The pose command",
"signal_name": "marker_pose",
"signal_type": "cartesian_state"
}
],
"parameters": [
{
"display_name": "Object to Track",
"description": "The name of the object to track, matching a class from the YOLO model.",
"parameter_name": "to_find",
"parameter_type": "string",
"default_value": "person"
},
{
"display_name": "Field of View (FoV)",
"description": "Camera field of view in degrees [horizontal, vertical]",
"parameter_name": "fov",
"parameter_type": "double_array",
"default_value": [
69.0,
42.0
]
},
{
"display_name": "Image Size",
"description": "Image resolution [width, height] in pixels",
"parameter_name": "image_size",
"parameter_type": "double_array",
"default_value": [
480,
840
]
},
{
"display_name": "Object Distance",
"description": "Assumed distance from the camera to the object in meters",
"parameter_name": "object_distance",
"parameter_type": "double",
"default_value": 0.6,
"dynamic": true
}
]
}
Enter the component folder in terminal and run
docker build -f aica-package.toml -t objectdetection .
Next, edit the AICA Launcher configuration and enter objectdetection under Custom Packages. After launching, you
should see
the Component Utils package listed in the "Add Component" menu and be able to add the custom YOLO to Marker component.
Application setup
- Add the YOLO to Marker component to the previously configured application
- Set the
Rateparameter to match the rate of the YOLO Executor - Set the
Object to Trackparameter topersonto track yourself in the frame - Set the remaining parameters based on your camera configuration
- Turn on the auto-configure and auto-activate switches
- Set the
- Connect the
Bounding Boxesoutput of the YOLO Executor component to theJSON Inputinput of the YOLO to Marker component
With the application running the logs should show the 3D position in the camera_frame.
Creating a frame and converting it to a signal
Add a Hardware Interface node to the application and select the Generic six-axis robot arm in the URDF selection,
then run the application. When it is running, select "3D Viz" at
the top right. Record a frame tool0 and name it camera_frame; this is the position of the camera. It can be moved by
dragging the axis markers, with the Z direction as the direction in which the camera is pointing. Note that the robot
will move to where the objects are detected, which may be unreachable depending on the camera position, and cause the
robot controller to stop.
tool0 is the end effector frame for Generic six-axis robot arm. If using a different robot then the frame should be
changed accordingly.
Stop the application, and go back to "Graph", open the yaml code and check that the recorded frame is there, for example:
frames:
camera_frame:
reference_frame: world
position:
x: 0
y: 0.3
z: 0.4
orientation:
w: 0
x: 0
y: 1
z: 0
To convert the frame to a signal:
- Add TF to Signal from AICA Core Components package
- Connect the load node to the On Start block (purple square with a black play symbol)
- Configure the component to auto-configure, auto-activate
- Set camera_frame and Reference frame to world.
With the application running the camera frame can be observed under
ROS Topics/tf_to_signal/pose(modulo_interfaces/msg/EncodedState).
Transforming a frame to world
To drive the robot towards the object position it needs to be in world frame. The Cartesian Transformation component can
convert from camera_frame to world. Add it to the application and connect the load node, connect the Pose Output from
TF to Signal to Input 1, and the output of YOLO to Marker to Input 2. The output of Cartesian Transformation is now
the object position in the world frame.
Moving a robot towards an object
We can use a Signal Point Attractor to move the robot end effector towards the object.
- Add the Signal Point Attractor to the application
- Configure the component to auto-configure and auto-activate.
- Connect the load node to the On Activate transition in YOLO to Marker. This means that the robot will not move until after YOLO to Marker has started.
- Connect
Cartesian state, under Robot State Broadcaster to theInput poseof Signal Point Attractor. - Connect the output from Cartesian Transformation to
Attractor pose. - Connect
Output twistto an IK Velocity Controller on the Hardware Interface, this can be added under Controllers.
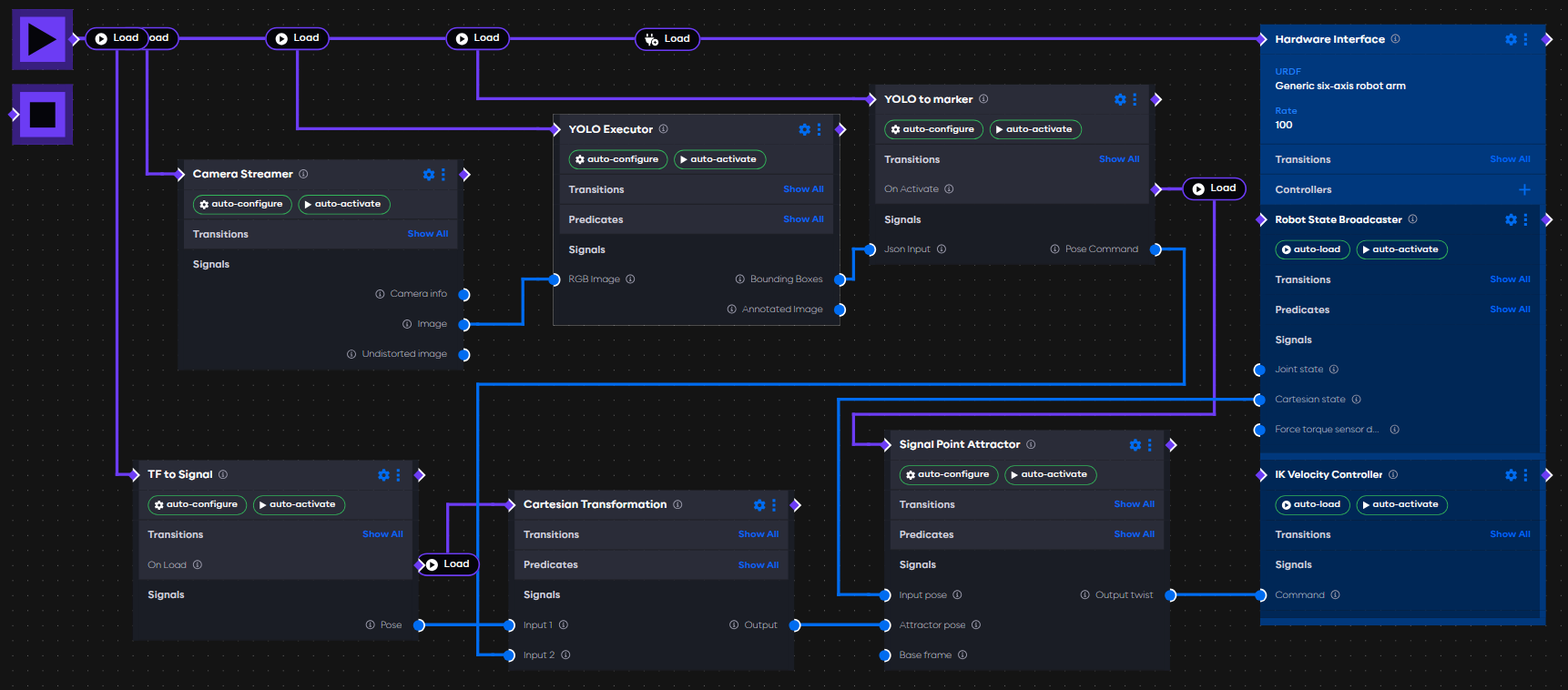
The final graph is shown below:
Application code
yaml application
schema: 2-0-4
dependencies:
core: v4.2.0
frames:
camera_frame:
reference_frame: world
position:
x: 0
y: 0.3
z: 0.4
orientation:
w: 0
x: 0
y: 1
z: 0
on_start:
load:
- hardware: hardware
- component: yolo_executor
- component: camera_streamer
- component: tf_to_signal
- component: yolo_to_marker
components:
yolo_to_marker:
component: component_utils::YoloToMarker
display_name: YOLO to marker
events:
transitions:
on_load:
lifecycle:
component: yolo_to_marker
transition: configure
on_configure:
lifecycle:
component: yolo_to_marker
transition: activate
on_activate:
load:
component: signal_point_attractor
parameters:
rate: !!float 5.0
object_distance: 0.4
inputs:
json_input: /yolo_executor/bounding_boxes
outputs:
marker_pose: /yolo_to_marker/state_command
signal_point_attractor:
component: aica_core_components::motion::SignalPointAttractor
display_name: Signal Point Attractor
events:
transitions:
on_configure:
lifecycle:
component: signal_point_attractor
transition: activate
on_load:
lifecycle:
component: signal_point_attractor
transition: configure
parameters:
rate: !!float 2.0
inputs:
state: /hardware/robot_state_broadcaster/cartesian_state
attractor: /cartesian_transformation/output
outputs:
twist: /signal_point_attractor/twist
cartesian_transformation:
component: aica_core_components::signal::CartesianTransformation
display_name: Cartesian Transformation
inputs:
input_1: /tf_to_signal/pose
input_2: /yolo_to_marker/state_command
outputs:
output: /cartesian_transformation/output
tf_to_signal:
component: aica_core_components::ros::TfToSignal
display_name: TF to Signal
events:
transitions:
on_configure:
lifecycle:
component: tf_to_signal
transition: activate
on_load:
lifecycle:
component: tf_to_signal
transition: configure
load:
component: cartesian_transformation
parameters:
frame: camera_frame
outputs:
pose: /tf_to_signal/pose
camera_streamer:
component: core_vision_components::image_streaming::CameraStreamer
display_name: Camera Streamer
events:
transitions:
on_load:
lifecycle:
component: camera_streamer
transition: configure
on_configure:
lifecycle:
component: camera_streamer
transition: activate
parameters:
source: /files/videos/hand.mp4
undistorted_image_cropping: false
outputs:
image: /camera_streamer/image
yolo_executor:
component: object_detection_components::YOLOExecutor
display_name: YOLO Executor
events:
transitions:
on_load:
lifecycle:
component: yolo_executor
transition: configure
on_configure:
lifecycle:
component: yolo_executor
transition: activate
parameters:
rate: !!float 1.0
model_file: /files/onnx/best.onnx
classes_file: /files/onnx/coco8.yaml
inputs:
rgb_image: /camera_streamer/image
outputs:
bounding_boxes: /yolo_executor/bounding_boxes
hardware:
hardware:
display_name: Hardware Interface
urdf: Generic six-axis robot arm
rate: 100
events:
transitions:
on_load:
load:
- controller: robot_state_broadcaster
hardware: hardware
- controller: ik_velocity_controller
hardware: hardware
controllers:
robot_state_broadcaster:
plugin: aica_core_controllers/RobotStateBroadcaster
outputs:
cartesian_state: /hardware/robot_state_broadcaster/cartesian_state
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: robot_state_broadcaster
ik_velocity_controller:
plugin: aica_core_controllers/velocity/IKVelocityController
inputs:
command: /signal_point_attractor/twist
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ik_velocity_controller
graph:
positions:
on_start:
x: 300
y: 0
stop:
x: 300
y: 100
components:
yolo_to_marker:
x: 1440
y: 60
signal_point_attractor:
x: 1460
y: 520
cartesian_transformation:
x: 960
y: 600
tf_to_signal:
x: 460
y: 560
camera_streamer:
x: 520
y: 160
yolo_executor:
x: 1020
y: 100
hardware:
hardware:
x: 1960
y: -20
edges:
yolo_to_marker_state_command_cartesian_transformation_input_2:
path:
- x: 1860
y: 280
- x: 1860
y: 580
- x: 940
y: 580
- x: 940
y: 860
yolo_executor_on_activate_yolo_to_marker_yolo_to_marker:
path:
- x: 1380
y: 200
- x: 1380
y: 120
on_start_on_start_yolo_executor_yolo_executor:
path:
- x: 680
y: 40
- x: 680
y: 160
on_start_on_start_camera_streamer_camera_streamer:
path:
- x: 480
y: 40
- x: 480
y: 220
hardware_hardware_robot_state_broadcaster_cartesian_state_signal_point_attractor_state:
path:
- x: 1400
y: 520
- x: 1400
y: 780
camera_streamer_image_yolo_executor_rgb_image:
path:
- x: 980
y: 420
- x: 980
y: 360
on_start_on_start_tf_to_signal_tf_to_signal:
path:
- x: 440
y: 40
- x: 440
y: 620
on_start_on_start_yolo_to_marker_yolo_to_marker:
path:
- x: 920
y: 40
- x: 920
y: 120
yolo_to_marker_on_activate_signal_point_attractor_signal_point_attractor:
path:
- x: 1900
y: 240
- x: 1900
y: 540
- x: 1420
y: 540
- x: 1420
y: 580
tf_to_signal_on_load_cartesian_transformation_cartesian_transformation:
path:
- x: 880
y: 740
- x: 880
y: 660
yolo_executor_bounding_boxes_yolo_to_marker_json_input:
path:
- x: 1420
y: 360
- x: 1420
y: 320
yolo_to_marker_marker_pose_cartesian_transformation_input_2:
path:
- x: 1860
y: 320
- x: 1860
y: 500
- x: 920
y: 500
- x: 920
y: 860